NavX makes it easy for businesses to monitor and control industrial robots in real time. From navigation to mapping, everything is at your fingertips – no complex setups required.
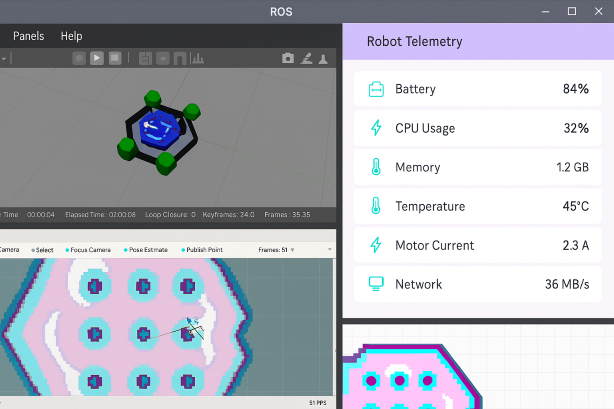
Track your robots like never before with live ROS data streams. NavX translates raw telemetry into clear insights on speed, health, and system performance, so your team can focus on productivity.
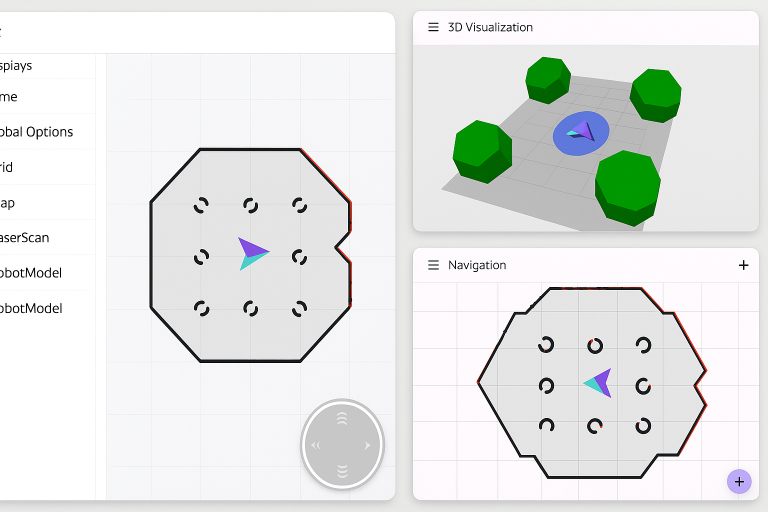
Built on ROS navigation stacks, NavX makes it easy to visualize robot position, create maps, and manage routes in real time – without needing to dive into code or command lines.
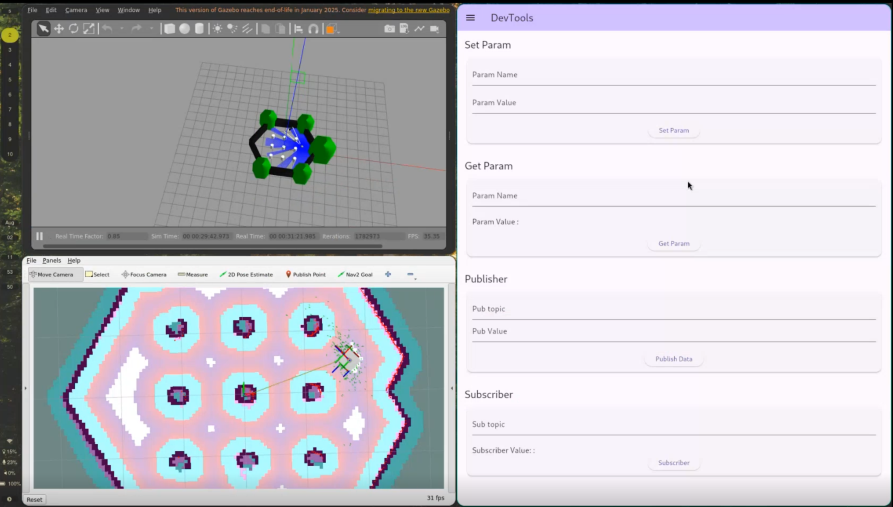
NavX provides a ROS-integrated control dashboard for operators.
From movement commands to environment awareness, control your industrial robots safely and efficiently – with just a few clicks.
NavX helps businesses adopt ROS-based robotics with ease, combining the flexibility of open-source ROS with an intuitive, operator-friendly interface. With NavX, you can accelerate deployment, improve safety, and scale robotics confidently for real-world industrial use.


NavX is an application that simplifies monitoring, navigation, and control of Autonomous Mobile Robots (AMRs) powered by ROS. It provides real-time insights, mapping, and an easy-to-use operator dashboard.
No. NavX is designed with an operator-friendly interface that hides the complexity of ROS. Engineers benefit from ROS flexibility, while operators can control robots with minimal training.
Yes. NavX is built to integrate with both ROS1 and ROS2 environments, making it future-proof and adaptable to different robotic platforms.
NavX supports ROS-based AMRs across warehousing, manufacturing, healthcare, logistics, and retail - wherever mobile robots are used to automate movement and tasks.
Yes. NavX provides centralized monitoring and control, enabling businesses to manage fleets of AMRs simultaneously for coordinated operations.
NavX leverages ROS navigation stacks to visualize real-time robot positions, generate maps, and plan safe paths - without needing to write complex ROS commands.
We help businesses design, build, and scale intelligent solutions for the future.